Tumor Identification
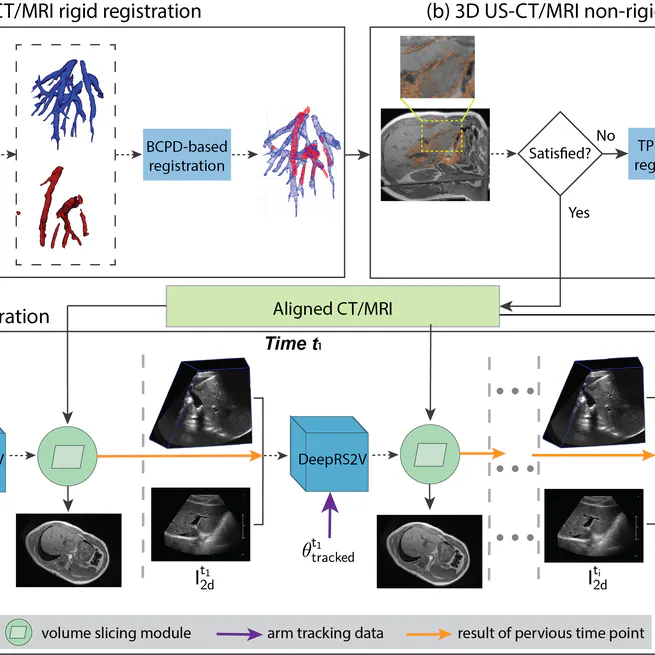
Objective: In US-guided liver tumor ablations, tumor identification remains challenging in some scenarios, such as similar acoustic characteristics between the tumor and surrounding tissue, irregular tumor locations (e.g., high liver dome), and tumor mimics (e.g., cirrhotic regenerative nodules, prior ablation sites). While multimodal registration techniques have been extensively studied to address these limitations, they have not yet become a standard clinical component due to the high complexity and computational demands. Therefore, this work aims to develop a clinically feasible 2D US-CT/MRI registration approach to reduce inter-physician variability in interpreting structural details, thereby facilitating applicator guidance during procedures.
Jan 1, 2024
3D US liver System
Oct 26, 2023
Tumor Coverage Evaluation
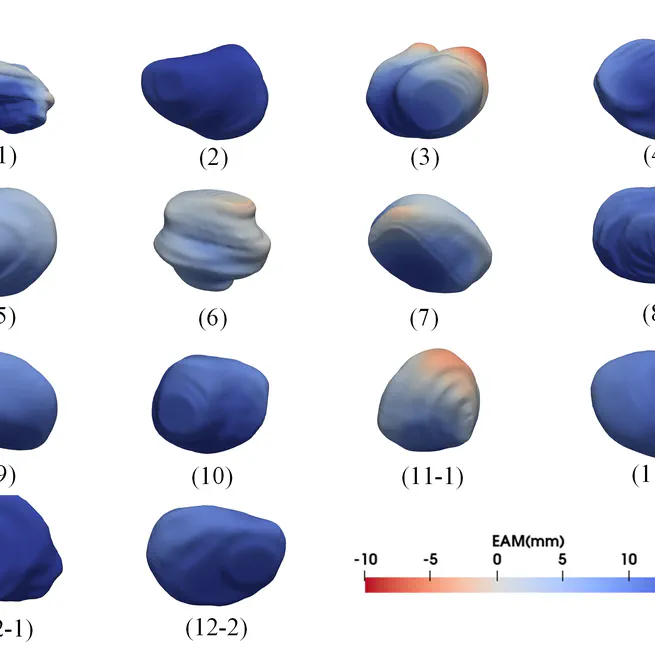
Objective: Complete tumor coverage by the thermal ablation zone and with a safety margin (5 or 10 mm) is required to achieve the entire tumor eradication in liver tumor ablation procedures. However, 2D ultrasound (US) imaging has limitations in evaluating the tumor coverage by imaging only one or multiple planes, particularly for cases with multiple inserted applicators or irregular tumor shapes. In this paper, we evaluate the intra-procedural tumor coverage using 3D US imaging and investigate whether it can provide clinically needed information. Our proposed method can evaluate the intra-procedural tumor coverage and intuitively provide applicator adjustment information for the physician. Our 3D US-based method is compatible with the constraints of conventional US-guided ablation procedures and can be easily integrated into the clinical workflow.
Jan 1, 2023
Needle Identification
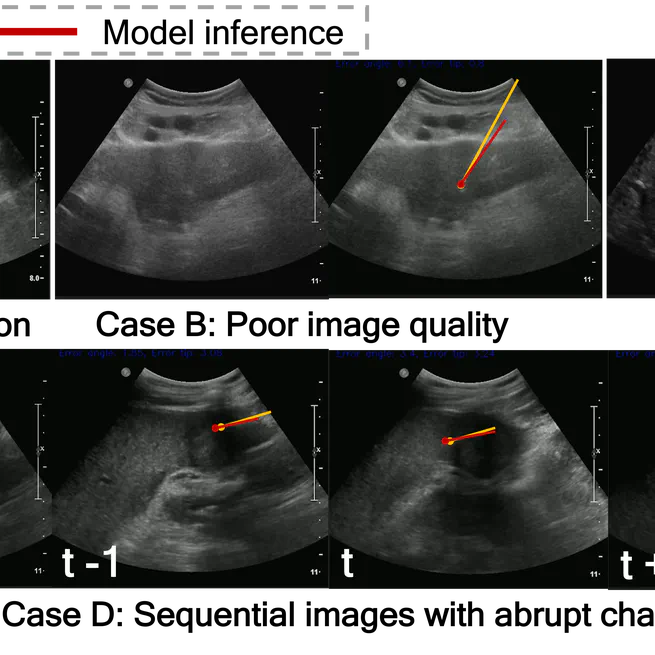
Objective: In US-guided percutaneous thermal ablation, to eradicate the entire cancerous cells, accurately inserting the needle (i.e., ablation applicator) into the tumour as planned is a crucial step during real-time US guidance. However, due to complex US artifacts and image contrast between the needle and adjacent tissues, identifying the needle, particularly the needle tip, has been considered as a difficult problem. Therefore, our work aims to develop a deep learning-based approach using acquired sequential US frames for real-time needle identification.
Oct 1, 2022